
By Dieter and Klaas
How can machines and systems that do not speak the same language communicate with each other?
This question is crucial in a logistics environment where automation and robotization go further and further. Quinaptis experiments to find the answer to this million-dollar-question. First with a Lego robot, now also with a Raspberry Pi mini-computer.
Bridging language barriers
Supply chains are increasingly being automated. Fully automated warehouses already exist where computer-controlled cranes load and unload the pallets. Robots pick orders or deliver the goods to packers in fulfillment centers for e-commerce. Soon, the entire chain in a warehouse is entirely automated and robotized. With, further ahead of us, autonomous trucks for transport and self-driving delivery vans for delivery.
Much of that technology already exists and is being further refined. But even more important: to ensure seamless operations from start to finish, machines, and systems that are intrinsically different from each other must exchange data and orders. If they cannot communicate, they cannot work together.
Robots are only as smart as we make them
Today, this is a challenge in automatic and semi-automatic warehouses. Automatic cranes or robots are pretty stupid things. They implement what the Warehouse Management System asks them to do. No more and no less. If they do not receive a new assignment, they stand still. A human would benefit from those silent periods to prepare for the next orders and to start sorting goods. But the automatic systems do not do this because a WMS cannot predict. It knows which goods are in stock and where they are, but not what and when something will arrive or leave.
Predictive inventory management tools such as the EWM module of SAP can help with this. Only: an automatic tool such as a crane, a robot or an AGV speaks with the WMS via a PLC. They communicate by exchanging structured messages – called telegrams – with defined fields. The crane receives the message, answers for confirmation, performs the task and sends a message to report it and to say that it is ready for the next order.
The Raspberry interpreter
As an SAP SCM specialist, Quinaptis strives, among other things, to make SAP systems communicate better with logistical equipment and thus improve efficiency and, above all, pro-activity. However, structured SAP-messages are completely different from those of a PLC. So there is a mismatch between the expectations of the SAP-system and the telegrams that the robot understands and sends back.
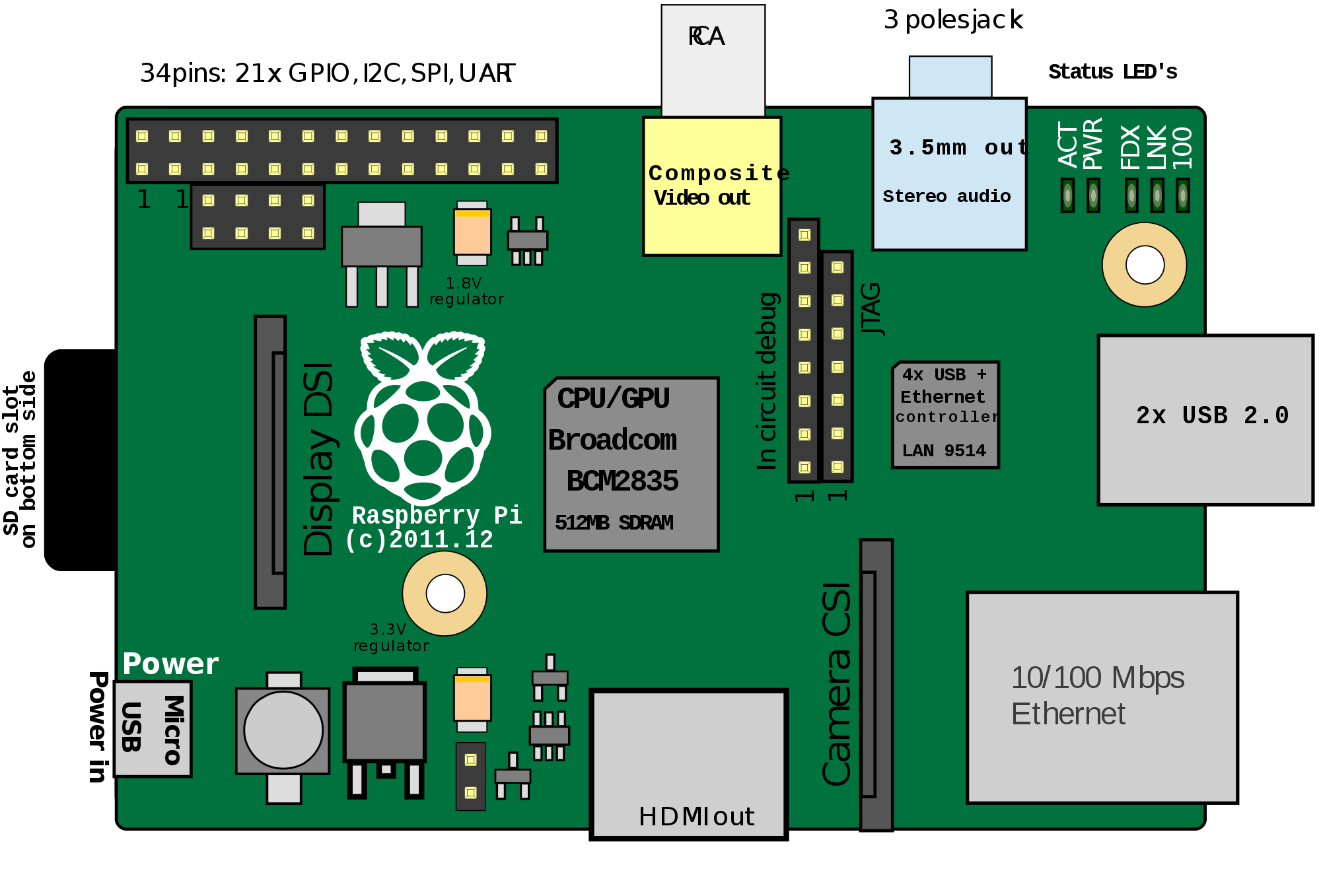
To demonstrate that communication can be established, we used a robot with Lego Technics components. That was a small success. Really talking was not possible yet, since they speak a different language. That is why we have gone a step further by placing a Raspberry Pi mini-computer between the SAP-system and the Lego-robot. He acts as an interpreter. The mini-computer translates the telegrams into a PLC-structured so that the robot can understand them. We chose a Raspberry Pi because one can program freely on such a computer. The first results of our experiments are promising.
The reason why we first experiment with toys is that we can better understand how those PLCs and telegrams work. Based on this experience, we can scale up and set up communication between SAP and hardware in a short period of time.
 Quinaptis bv
Quinaptis bv
Neerlandweg 17
2610 Antwerp
Belgium
+32 3 386 03 75
Lage Mosten 49-63
4822 NK Breda
Netherlands
+31 76 80 80 231
![]()